간단한 기계 장치에 사용할 수 있는 곱하거나 보강한 힘을 적용하는 것이 종종에서 비용이 거리를 통해 우리는 힘을 적용합. “기계”에 대한 단어는”일을 더 쉽게하기 위해”를 의미하는 그리스어 단어에서 유래했습니다.”레버,기어,풀리,웨지 및 나사는 기계의 몇 가지 예입니다. 기계는 투입된 에너지보다 더 많은 작업을 수행 할 수 없기 때문에 이러한 장치에 대한 에너지는 여전히 보존됩니다. 그러나 기계는 작업을 수행하는 데 필요한 입력력을 줄일 수 있습니다., 어떤 간단한 기계를 위한 입력 힘 magnitudes 에 산출의 비율은 그것의 기계적인 이점(MA)에게 불립니다.
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}\\
중 하나의 간단한 기계,레버는 엄밀한 막대기를 선회에는 수정이라는 장소의 지점. 토크는 피벗 포인트에 대한 회전이 있기 때문에 레버에 관여합니다. 레버의 물리적 피벗으로부터의 거리는 결정적이며,우리는 이러한 거리의 관점에서 MA 에 대한 유용한 식을 얻을 수 있습니다.,
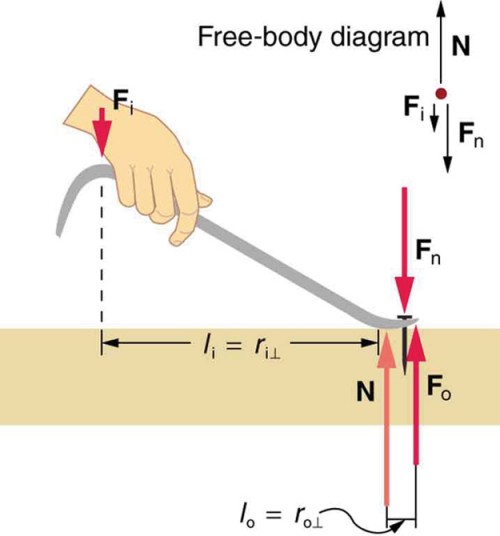
그림 1. 네일 풀러는 큰 기계적 이점을 가진 레버입니다. 네일 풀러의 외부 힘은 단단한 화살표로 표시됩니다. 네일 풀러가 네일(Fo)에 가하는 힘은 네일 풀러에 가해지는 힘이 아닙니다. 못이 끌어당기는 사람(Fn)에 후에 발휘하는 반응 힘은 외부 힘이고 Fo 와 동등하고 반대입니다. 입력 및 출력 힘의 수직 레버 암은 li 및 lo 입니다.
그림 1 에 레버 타입에 사용되는 못으로 끌어당기는 사람., 지렛대,시소 및 기타 레버는 모두이 레버와 유사합니다. Fi 는 입력 힘이고 Fo 는 출력 힘입니다. 거기에는 세 가지 수직 작용하는 힘을 못에 끌어당기는 사람(시스템의 관심사)–이 Fi,Fo N.Fn 은 반응력을 다시 시스템에 동일하고 반대를 Fo. (Fo 는 시스템에 힘이 아니라는 점에 유의하십시오.)N 은 레버에 가해지는 정상적인 힘이며,피벗에서 가해지기 때문에 토크는 0 입니다. 균형에 대한 두 번째 조건(순 τ=0)을 만족시키기 위해 손톱이 움직이지 않으면 Fi 와 Fn 으로 인한 토크가 서로 같아야합니다., (못이 실제로 움직이기 위해서는 Fi 로 인한 토크가 fn 으로 인한 토크보다 약간 커야합니다. 에)그러므로,
리 Fi=lo Fo
어디에 리튬 및 소호 거리에서 입력 및 출력에 적용되는 기본이고,다음과 같습니다. 정 마지막 방정식을 제공
\frac{{F}_{\text{o}}}{{F}_{\text{i}}}=\frac{{l}_{\text{i}}}{{l}_{\text{o}}}\\.,
어떤 이익을 가장 우리 여기에는 규모의 힘으로 못을 끌어당기는 사람,Fo,보다 훨씬 큰 규모의 입력에 적용되는 힘을 끌어당기는 다른 쪽 끝에서,습니다. 손톱에 대해서 끌어당기는 사람,
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}=\frac{{l}_{\text{i}}}{{l}_{\text{o}}}\\
이 방정식에 대한 사실 레버에 일반적입니다. 못 끌어 당기는 사람을 위해,MA 는 확실히 하나보다 큽니다. 못 끌어 당기는 사람에 손잡이가 길수록,당신이 그것으로 발휘할 수있는 힘이 커집니다., 네일 풀러와 약간 다른 두 가지 유형의 레버는 그림 2 에 표시된 수레와 삽입니다. 이러한 모든 레버형과 유사에서는 세 가지 힘이 참여–입력,출력,그리고 힘이에 피벗고,따라서 그들의 MAs 에 의해 주어진
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}\\
\text{MA}=\frac{{d}_{1}}{{d}_{2}}\\,
으로 거리 측정되는 상대적인 실제 피벗., 수레와 삽은 입력력과 출력력이 모두 피벗의 같은면에 있기 때문에 못 풀러와 다릅니다. 수레의 경우,출력 힘 또는 하중은 피벗(휠의 차축)과 입력 또는 적용된 힘 사이에 있습니다. 의 경우에 삽 입력 힘 사이의 피벗(의 끝에서 처리)과 로드,하지만 입력 레버를 팔보다 짧은 레버 출력 arm. 이 경우 MA 는 1 개 미만입니다.
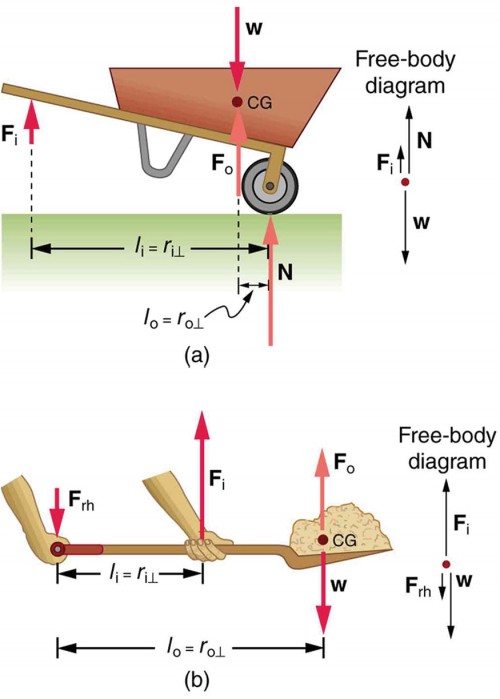
그림 2., (a)수레의 경우,출력 힘 또는 하중은 피벗과 입력 힘 사이에 있습니다. 피벗은 휠의 액슬입니다. 여기서 출력 힘은 입력 힘보다 큽니다. 따라서 수레를 사용하면 몸만으로도 할 수있는 것보다 훨씬 무거운 짐을 들어 올릴 수 있습니다. (b)삽의 경우,입력 힘은 피벗과 하중 사이에 있지만 입력 레버 암은 출력 레버 암보다 짧습니다. 피벗은 오른손으로 잡고있는 핸들에 있습니다., 여기에서,출력 강제(을 지원하는 삽의 load)보 입력(손에서 가장 가까운로드),기 때문에 입력이 가해지는 가까운 피벗 이상이 출력됩니다.
또 다른 매우 간단하는 기계가 경기입니다. 밀어 카트까지 비행기가 보다 쉽게 드는 동일한 카트는 바로 최고 사용하는 사다리기 때문에 강제 적용이 덜합니다. 그러나 두 경우 모두 수행 된 작업(마찰에 의해 수행 된 작업이 무시할 만하다고 가정)은 동일합니다., 경사 차선이나 경사로는 아마도 이집트 피라미드를 건설하는 동안 큰 돌 블록을 꼭대기로 옮기는 데 사용되었을 것입니다. 크랭크는 그림 3 과 같이 피벗에 대해 360º 회전 할 수있는 레버입니다. 그러한 기계는 레버처럼 보이지 않을 수도 있지만 그 행동의 물리학은 동일하게 유지됩니다. 크랭크의 MA 는 단순히 반경 ri/r0 의 비율입니다. 바퀴와 기어도 자신의 마스에 대한이 간단한 표현이있다. 그림과 같이 바퀴를 구동하는 단순화 된 자동차 액슬의 경우 크랭크의 경우 1 보다 크거나 1 보다 작을 수 있습니다. 액슬의 반경이 2 인 경우.,0cm 고 바퀴의 반경이 24.0cm,다음 MA=2.0/24.0=0.083 및 차축 것을 발휘하의 힘 12,000N 에는 휠을 사용하에 그것을 발휘하의 힘 1000N 습니다.
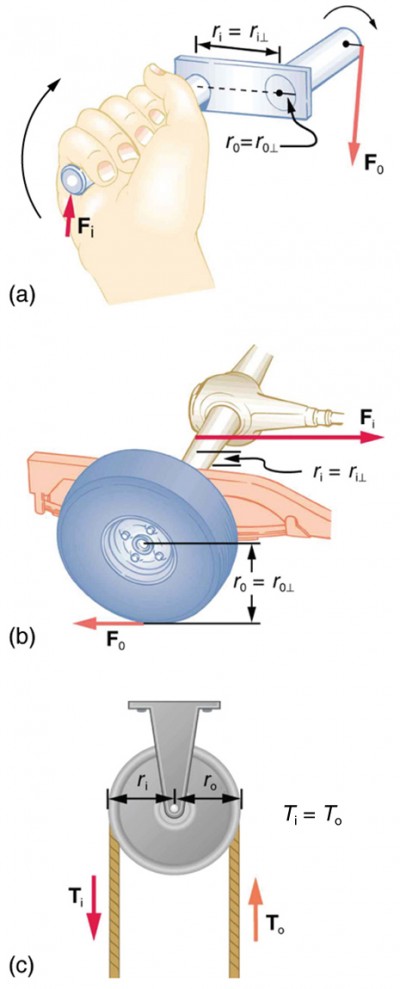
그림 3. 크랭크는 피벗에 대해 360º 회전 할 수있는 레버 유형입니다. 크랭크는 일반적으로 큰 엄마를 갖도록 설계되었습니다. (b)단순화 된 자동차 차축은 차축보다 훨씬 큰 직경을 갖는 휠을 구동한다. MA 는 1 보다 작습니다. (c)일반 도르래는 무거운 짐을 들어 올리는 데 사용됩니다., 풀리는 크기를 변경하지 않고 코드에 의해 가해지는 힘 T 의 방향을 변경합니다. 따라서이 기계의 MA 는 1 입니다.
일반 풀리는 MA 가 1 입니다. 도 4 에 도시 된 것과 같은 도르래의 조합은 힘을 곱하는 데 사용됩니다. 도르래가 마찰이없는 경우,힘 출력은 대략 케이블의 장력의 적분 배수입니다., 수 케이블길이 직접 위로 시스템에서 관심사의 그림과 같이 그림에서 아래 제시된 약 MA 의 폴리 시스템입니다. 이후 각 부착에 적용되는 외부의 힘에 약과 같은 방향으로 다른 사람들을 생산,총 강제로는 거의 중요한 여러의 입력 강 T.
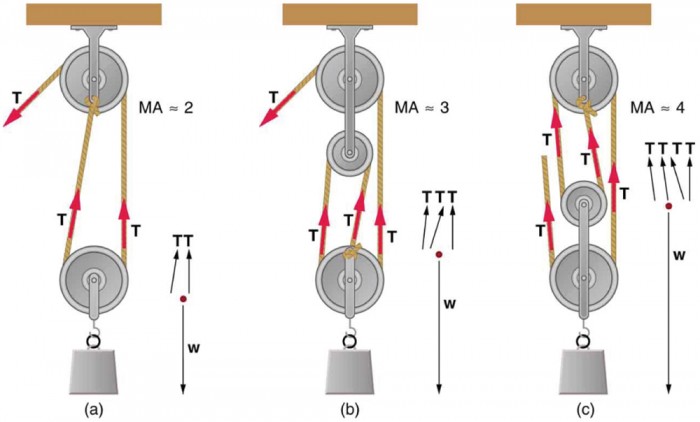
그림 4. (a)도르래의 조합은 힘을 곱하는 데 사용됩니다. 도르래가 마찰적 인 경우 힘은 장력의 적분 배수입니다., 이 풀리 시스템에는 두 개의 케이블이 하중에 부착되어있어 약 2T 의 힘을가합니다. 이 기계에는 MA≈2 가 있습니다. (b)3 개의 도르래는 기계적 이점이 약 3 인 방식으로 하중을 들어 올리는 데 사용됩니다. 효과적으로 부하에 부착 된 세 개의 케이블이 있습니다. (c)이 풀리 시스템은 4T 의 힘을 적용하므로 MA≈4 가 있습니다. 효과적으로 4 개의 케이블이 관심있는 시스템을 당기고 있습니다.,
섹션에서 요약
- 간단한 기계 장치에 사용할 수 있는 곱하거나 보강한 힘을 적용하는 것이 종종에서 비용이 거리를 통해 우리는 우리를 적용하는 힘입니다.
- 출력의 비율을 입력해 어떤 간단한 기계라고 기계적 장점
- 몇 가지 간단한 기계,레버를 못을 끌어당기는,외바퀴 손수레,크랭크,etc.
개념적 질문
1. 가위는 이중 레버 시스템과 같습니다., 그림 1 과 그림 2 의 간단한 기계 중 어느 것이 가위와 가장 유사합니까?나는 이것을 할 수 없다. 그림 1 과 같이 네일 풀러를 사용하여 일정한 속도로 못을 당긴다 고 가정 해보십시오. 네일 풀러가 평형 상태입니까? 당신이 약간의 가속으로 못을 당기면 어떨까요-네일 풀러가 평형 상태에 있습니까? 어떤 경우 네일 풀러에 가해지는 힘이 더 크고 그 이유는 무엇입니까?쨈챘짹쨀째쩔징 쨉청쨋처 쨩챌쨋첨쨉챕 쨘쨍쨀쨩쩔챘짹쨀째쩍쨈쨈. 왜에 가해지는 힘에 의해 외부 세계 사이 우리 몸의 일반적으로 보다 훨씬 작은 가해지는 힘에 의해 근육 내 몸?,쨈챘짹쨀째쩔징 쨈챘쩔짤 쨘쨍쨀쨩쩔징 쨈챘쩔짤 쨘쨍쨀쨩쨈쨈. 왜 우리의 관절에있는 힘이 우리가 팔다리로 외부 세계에 가하는 힘보다 몇 배 더 큰지 설명하십시오. 이 힘이 근육의 힘보다 더 클 수 있습니까(이전 질문 참조)?
문제&연습
1. 은 무엇인 기계의 활용에 못을 끌어당기는 사람—와 유사한 그림 1 에 나와—당신을 발휘하는 힘 45cm 에서의 피봇과 손톱이 1.8cm 다른 측면에서? 손톱에 1250N 의 힘을 가하기 위해 어떤 최소한의 힘을 발휘해야합니까?,
그림 1. 네일 풀러는 큰 기계적 이점을 가진 레버입니다. 네일 풀러의 외부 힘은 단단한 화살표로 표시됩니다. 네일 풀러가 네일(Fo)에 가하는 힘은 네일 풀러에 가해지는 힘이 아닙니다. 못이 끌어당기는 사람(Fn)에 후에 발휘하는 반응 힘은 외부 힘이고 Fo 와 동등하고 반대입니다. 입력 및 출력 힘의 수직 레버 암은 li 및 lo 입니다.나는 이것을 할 수 없다. 250kg 모어에 6 의 거리를 올릴 필요가 있다고 가정 해보십시오.,타이어를 갈아 입히기 위해 땅 위 0cm. 2.0-m 길이의 레버가 있다면 힘이 300N 으로 제한되면 지렛대를 어디에 두겠습니까?쨈챘짹쨀째쩔징 쨉청쨋처 쨩챌쨋첨쨉챕 쨘쨍쨀쨩쩔챘짹쨀째쩍쨈쨈. a)어떤 기계적도 이용하실 수레와 같이 하나의 그림 2,는 경우 중심의 수레와의 수직 레버의 팔 5.50cm 하는 동안,손에 수직으로 레버의 팔 1.02m? (b)결합 된 질량이 55.0kg 인 경우 수레와 그 하중을지지하기 위해 어떤 상향 힘을 발휘해야합니까? (c)바퀴가 땅에 어떤 힘을 가하는가?,쨈챘짹쨀째쩔징 쨈챘쩔짤 쨘쨍쨀쨩쩔징 쨈챘쩔짤 쨘쨍쨀쨩쨈쨈. 일반적인 자동차에는 반경이 1.10cm 인 차축이 27.5cm 인 타이어를 구동합니다. 그림 3(b)에서 매우 단순화 된 모델을 가정 할 때 기계적 이점은 무엇입니까?쨈챘짹쨀째쩔징 쨈챘쩔짤 쨘쨍쨀쨩쩔징 쨈챘쩔짤 쨘쨍쨀쨩쨈쨈. 운동 1 의 손톱 끌어 당기는 사람은지지 표면에 어떤 힘을 발휘합니까? 네일 풀러의 질량은 2.10kg 입니다.쨈챘짹쨀째쩔징 쨈챘쩔짤 쨘쨍쨀쨩쩔징 쨈챘쩔짤 쨘쨍쨀쨩쨈쨈. 사용한 경우 이상적인 폴리에 표시된 유형의 그림 4(a)을 지원하는 자동차 엔진의 질량 115kg,(a)어떤 것의 긴장 밧줄?, (비)천장에 어떤 힘을 공급해야하는지,당신이 밧줄로 똑바로 잡아 당긴다고 가정합니까? 도르래 시스템의 질량을 무시하십시오.
그림 4. (a)도르래의 조합은 힘을 곱하는 데 사용됩니다. 도르래가 마찰적 인 경우 힘은 장력의 적분 배수입니다. 이 풀리 시스템에는 두 개의 케이블이 하중에 부착되어있어 약 2T 의 힘을가합니다. 이 기계에는 MA≈2 가 있습니다. (b)3 개의 도르래는 기계적 이점이 약 3 인 방식으로 하중을 들어 올리는 데 사용됩니다., 효과적으로 부하에 부착 된 세 개의 케이블이 있습니다. (c)이 풀리 시스템은 4T 의 힘을 적용하므로 MA≈4 가 있습니다. 효과적으로 4 개의 케이블이 관심있는 시스템을 당기고 있습니다.
7. 그림 4(c)에 표시된 도르래에 대해 운동 6 을 반복하여 로프에서 똑바로 잡아 당긴다고 가정합니다. 풀리 시스템의 질량은 7.00kg 입니다.나는 이것을 할 수 없다.