는 데 문제가 있는 경우의 개념을 이해의 축 회전,여기에 간단한 설명이 있습니다. 이 개념은 이해하의 비행기의 움직임과 다양한 형태의 움직임에 관절,그래서 배울 수 있는지 그 첫 번째 복용하기 전에 세 가지 축의 회전.
회전축은 가상의 실체이기 때문에 파악하기 어려운 개념이 될 수 있습니다., 에서 참조하는 인간 해부학,축의 회전이 가상의 선는 프로젝트를 통해 피벗/회전 점에서 공동(예를 들어,회전 축을 구부리기를 위한 확장하고 팔을 통해 프로젝트를 팔꿈치 관절). 3 개의 운동 평면(즉,사골동,정면 및 횡 방향)에서의 각 운동은 회전축에 대해 발생합니다. 물론 가상의 것이 아닌 운동 자체는 가상의 회전축에 수직 인 가상의 운동 평면에서 발생합니다., 즉,허수 구성 요소 인 평면과 축이 모두 교차하여 직각(90°)각도를 만듭니다. 에 팔꿈치를 들어,팔 움직임에서 시상면으로 동의의 팔꿈치 관절(를 통해 축의 회전이 발생합니다)코드 및 확장합니다. 는 팔의 움직임에서 시상면의 모션은 회전 축을 중심으로 발생하는 팔꿈치에서 할 수있는 굴곡하고 확장입니다., 기 때문에 굴곡과 확장에서 발생하는 전방과 후방 방향으로 각각의 회전 축에 수직하고 프로젝트를 통해 공동에서 mediolateral,또는 옆으로 방향입니다. 따라서 팔꿈치의 경우 운동은 내측 회전축을 중심으로 사골 평면(굴곡 및 연장)에서 발생합니다.
마찬가지로 거기에는 세 가지 비행기의 운동,거기에 세 가지 축의 회전:전방 뒤 축 mediolateral 축이며,세로 축입니다. 조인트는 이러한 축에서 회전하여 평면에서 움직임이 일어나도록합니다.,
전후방 축
으로도 알려진 화살 축 또는 전후 축
상상해 pin 을 삽입하는 합작을 통해 앞쪽에서 뒷면(전방과 후방),효과적으로 달아 아래로 공동 제한 그것의 잠재적인 자유의 움직임. 예를 들어,엉덩이 관절의 앞쪽을 통해 들어가고 뒤쪽으로 빠져 나가는 핀을 생각할 수 있습니다. 기 때문에 핀의 위치,만 움직임에 대해 허용되는 이 축 측면 운동(납치 또는 내전)에서 전 비행기.,
Mediolateral 축
도 알려져 있으로 가로 축
Mediolateral 을 의미하는 것은 우리가 우리의 가상 pin 을 삽입하려면에서는 측면 또는 측면 접근 방식이다. 앞의 팔꿈치 예에서와 같이,축은 관절의 내측에서 투영되고 측면으로 확장됩니다. 핀의 위치는이 축에 대한 사골면에서의 전진 및 후진 운동(굴곡 및 연장)만 허용합니다.
경도 축
경우 우리는 삽입하는 우리의 핀을 통해 공동 위에서 아래로,그것은 움직임에 통과하는 비행기만 해당(즉,회전)., 긴 핀이 자궁 경부 척추의 꼭대기로 들어가서 요추를 빠져 나가는 것을 상상해보십시오. 핀 것이 효과적으로 방지 척추 굽힘에서 앞,뒤,또는 옆으로,그러나 그것은 것을 허용한 척추위에 따라서 통과하는 비행기.
조인트는 이러한 축에서 회전하여 평면에서 움직임이 발생할 수 있습니다. 일부는 한 축에서만 회전하고 다른 축은 여러 축에서 회전합니다.
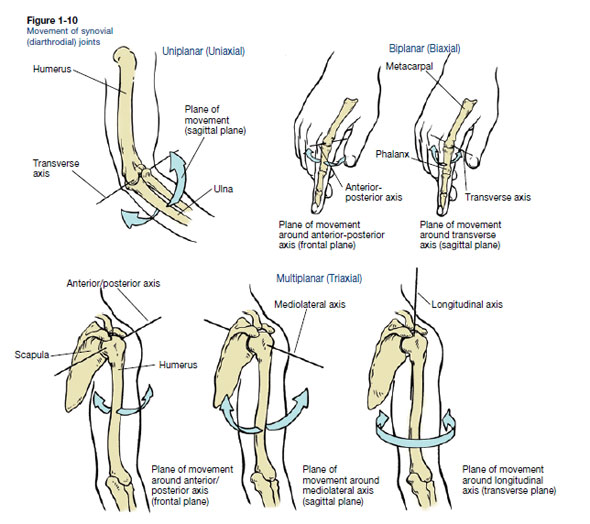
Uniaxial 또는 uniplanar 조인트(힌지 조인트라고도 함)는 한 축에서 회전하여 한 평면에서 움직일 수 있습니다., 팔꿈치 관절은 사골 평면에서 전진 및 후진(굴곡 및 연장)만 허용하기 때문에 힌지 조인트입니다.
이축 또는 이축 관절은 두 축에서 회전하여 두 평면에서 움직일 수 있습니다. 발과 손은 이축/이축 관절의 예입니다. 그들은 둘 다 정면 평면에서 옆으로,또는 좌우로,그리고 사골 평면에서 앞뒤로(굴곡 및 연장)움직입니다.
Multiplanar 또는 3 축 조인트는 세 개의 모든 평면에서 이동을 허용하는 세 축 모두에서 회전합니다. 어깨 관절은 다중 축/삼축 관절의 예입니다., 그것은 앞으로 뒤로 이동에 정중면,측면 또는 측면 움직임에서 정면 평면 및 내부와 외부에서 회전 통과하는 비행기.