シンプルマシンは、私たちが適用する力を乗算または増強するために使用できるデバイスです–多くの場合、私たちが力を適用する距離を犠牲にして。 “機械”のための単語は”事をより容易にするのを助けるために”意味するギリシャの単語から来る。”レバー、ギヤ、滑車、くさびおよびねじは機械のある例である。 エネルギーが保存されたそれらのデバイスが機械ではできない仕事のエネルギーに入れます。 ただし、機械はジョブを実行するために必要な入力力を減らすことができます。, 任意の単純な機械に対する出力と入力力の大きさの比は、その機械的優位性(MA)と呼ばれます。
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}\\
最も単純なマシンの一つは、支点と呼ばれる固定された場所で旋回する剛性のバーであるレバーです。 ピボットポイントの周りの回転があるので、トルクはレバーに関与しています。 レバーの物理的なピボットからの距離は重要であり、これらの距離に関してMAに対する有用な式を得ることができます。,
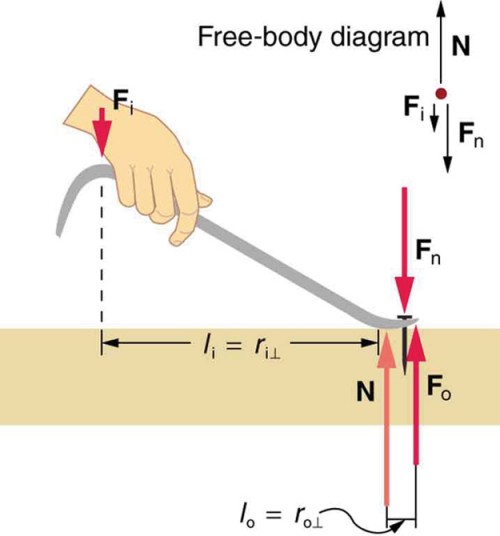
図1. 釘の引き手は大きい機械利点のレバーである。 釘の引き手の外力は固体矢印によって表される。 釘の引き手が釘(Fo)に加える力は釘の引き手の力ではないです。 釘が引き手(Fn)で出す反力は外力であり、Foと等しく、反対です。 入力および出力力の垂直レバーアームは、liおよびloです。
図1は、ネイルプーラーとして使用されるレバータイプを示しています。, バール、シーソー、および他のそのようなレバーはすべてこれに類似しています。 Fiは入力力、Foは出力力です。 これらはFi、FoおよびNである。Fnは、システム上の反力であり、Foと等しく反対である。 (Foはシステム上のforceではないことに注意してください。)Nはレバーに対する通常の力であり、そのトルクはピボットで発揮されるのでゼロである。 爪が動いていない場合、FiとFnによるトルクは互いに等しくなければならず、平衡条件(net σ=0)を満たさなければならない。, (爪が実際に動くためには、FiによるトルクはFnによるトルクよりもわずかに大きくなければなりません。 したがって、
li Fi=lo Fo
ここで、liとloは、図に示すように、入力と出力の力がピボットに加えられる距離です。 最後の方程式を並べ替えると、
\frac{{F}_{\text{o}}}{{F}_{\text{i}}}=\frac{{l}_{\text{i}}}{{l}_{\text{o}}}\\。,
ここで最も興味深いのは、爪引き手Foによって加えられる力の大きさが、他端Fiにおける引き手に加えられる入力力の大きさよりもはるかに大き 爪の引き手のために、
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}=\frac{{l}_{\text{i}}}{{l}_{\text{o}}}\\pこの式は一般にレバーに当てはまります。 ネイルプーラーの場合、MAは確かに一つよりも大きいです。 ネイルプーラーのハンドルが長いほど、あなたがそれを発揮できる力が大きくなります。, ネイルプーラーとわずかに異なるレバーの他の二つのタイプは、図2に示す手押し車とシャベルです。 したがって、それらのMAsは
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}\\
および
\テキスト{ma}=\frac{{d}_{1}}{{d}_{2}}\\,
物理的なピボットに対する距離が測定されています。, 手押し車とシャベルは、入力と出力の両方の力がピボットの同じ側にあるため、釘の引き手とは異なります。 手押し車の場合、出力力または負荷は、ピボット(車輪の車軸)と入力または加えられた力の間にあります。 シャベルの場合、入力力はピボット(ハンドルの端)と負荷の間にありますが、入力レバーアームは出力レバーアームよりも短くなります。 この場合、MAは一つ未満である。
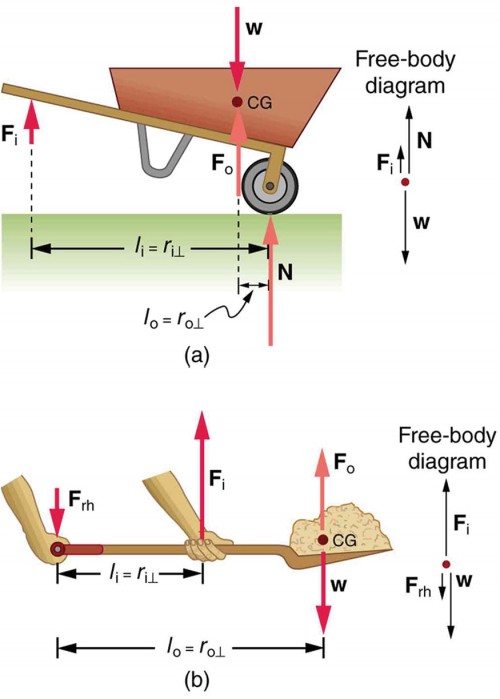
図2., (a)手押し車の場合には、出力力か負荷はピボットと入力力の間にあります。 ピボットは車輪の車軸です。 ここで、出力力は入力力よりも大きい。 従って、手押し車は単独であなたの体とできたより大いに重負荷を持ち上げることを可能にする。 (b)シャベルの場合、入力力はピボットと負荷の間にありますが、入力レバーアームは出力レバーアームよりも短いです。 ピボットは右手によって握られるハンドルにある。, ここでは、入力が出力よりもピボットに近づくため、出力力(シャベルの負荷を支える)は入力力(負荷に最も近い手からの)よりも小さくなります。
もう一つの非常に単純なマシンは傾斜面です。 平面の上のカートを押すことは加えられた力がより少しであるので、梯子を使用して上まで同じカートをまっすぐに持ち上げるより容易である。 しかし、両方の場合に行われる作業(摩擦によって行われる作業が無視できると仮定する)は同じです。, 傾斜した車線または傾斜路は、おそらくエジプトのピラミッドの建設中に、石の大きなブロックを上に移動させるために使用されました。 クランクは、ピボットの周りを360°回転させることができるレバーです(図3に示すように)。 そのような機械はレバーのようには見えないかもしれませんが、その行動の物理学は同じままです。 クランクのMAは、単に半径ri/r0の比です。 車輪およびギヤにMAsのためのこの簡単な表現があるも。 MAは、図のように、クランクの場合と同様に1より大きく、または車輪を駆動する簡略化された車の車軸の場合と同様に1より小さくすることができ 車軸の半径が2の場合。,0cmで車輪の半径は24.0cmであり、MA=2.0/24.0=0.083であり、車軸は車輪に12,000Nの力をかけて地面に1000Nの力をかける必要があります。
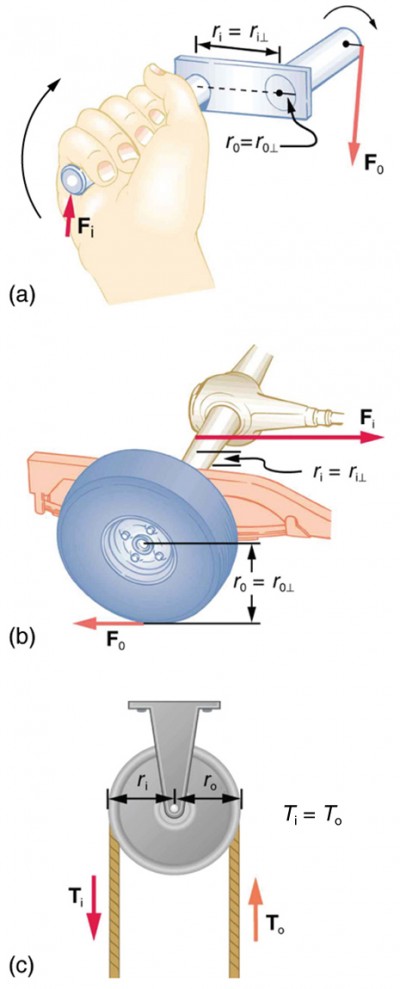
図3. (a)クランクはピボットについての360º回すことができるタイプのレバーです。 クランクは通常、大きなMAを持つように設計されています。 (b)簡略化された自動車の車軸は、車軸よりもはるかに大きな直径を有する車輪を駆動する。 MAは1未満です。 (c)通常の滑車が重負荷を持ち上げるのに使用されています。, 滑車は、その大きさを変えることなく、コードによって加えられる力Tの方向を変える。 それ故に、この機械に1のMAがある。
通常のプーリーのMAは1で、力の方向のみが変更され、大きさは変更されません。 図4に示すような滑車の組み合わせは、力を掛けるために使用されます。 滑車が摩擦なしであれば、力の出力はおよそケーブルの張力の整数倍である。, 以下に示す図に示すように、関心のあるシステム上で直接上方に引っ張るケーブルの数は、およそプーリシステムのMAである。 それぞれのアタッチメントは、他のものとほぼ同じ方向に外力を加えるので、それらは追加され、入力力Tのほぼ整数倍である総力を生成する。
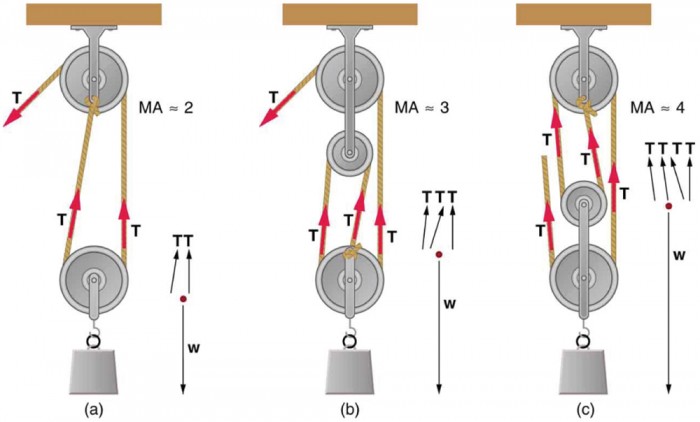
図4. (a)滑車の組合せが力を増加するのに使用されています。 滑車が摩擦がない場合、力は張力の積分倍数である。, 従ってこの滑車システムに負荷に付す二つのケーブルがありおよそ2Tの力を加える。 このマシンはMA≥2を持っています。 (b)三つのプーリーは、機械的な利点が約3であるような方法で負荷を持ち上げるために使用されます。 効果的に、負荷に取り付けられた三つのケーブルがあります。 (c)この滑車システムはMA≥4があるように、4Tの力を加えます。 効果的に、ケーブルを引っ張り、システムです。,
Section Summary
- 単純な機械は、私たちが適用する力を乗算または増強するために使用できるデバイスです–多くの場合、力を加えなければならな
- 任意の単純なマシンのための入力力に対する出力の比は、その機械的利点と呼ばれています
- いくつかの簡単なマシンは、レバー、爪の引き手、手押し車、
概念的な質問
1. はさみは二重レバーシステムのようである。, 図1と図2の単純なマシンのどれがはさみに最も似ていますか?
2. 図1に示すように、ネイルプーラーを使用して一定の速度で爪を引っ張るとします。 爪の引き手は平衡にありますか? あなたがいくつかの加速で爪を引っ張った場合はどうなりますか–爪の引き手は平衡状態ですか? その場合、爪の引き手に加えられる力は大きく、なぜですか?
3. なぜ私たちの体の手足によって外の世界に加えられる力は、通常、体内の筋肉によって加えられる力よりもはるかに小さいのですか?,
4. 私たちの関節の力が、私たちの手足で外界に及ぼす力よりも数倍大きい理由を説明してください。 これらの力は筋肉の力よりもさらに大きくなりますか(前の質問を参照)?
問題&演習
1. 図1に示すように、ピボットから45cmの力を発揮し、爪が反対側に1.8cmの力を発揮するネイルプーラーの機械的利点は何ですか? 1250Nの力を爪に加えるためには、どのような最小の力を加えなければなりませんか?,
図1. 釘の引き手は大きい機械利点のレバーである。 釘の引き手の外力は固体矢印によって表される。 釘の引き手が釘(Fo)に加える力は釘の引き手の力ではないです。 釘が引き手(Fn)で出す反力は外力であり、Foと等しく、反対です。 入力および出力力の垂直レバーアームは、liおよびloです。
2. 250kgの芝刈り機を6の距離に上げる必要があるとします。,タイヤを交換するために地面の上0センチメートル。 長さ2.0メートルのレバーを持っていた場合、あなたの力が300Nに制限されていた場合、どこに支点を置くのでしょうか?
3. a)手押し車の重心とその荷重が5.50cmの垂直レバーアームを持ち、手が1.02mの垂直レバーアームを持つ場合、図2のような手押し車の機械的利点は何ですか? (b)組み合わせ質量が55.0kgの場合、手押し車とその荷重を支えるためにどのような上向きの力を加えるべきですか? (c)車輪は地面にどのような力を及ぼしますか?,
4. 典型的な車は、半径1.10cmの車軸を持ち、半径27.5cmのタイヤを駆動します。 図3(b)の非常に単純化されたモデルを仮定すると、その機械的利点は何ですか?
5. エクササイズ1のネイルプーラーは、支持面にどのような力を与えますか? 釘の引き手に2.10kgの固まりがある。
6. 図4(a)に示すタイプの理想的なプーリーを使用して、質量115kgの自動車エンジンをサポートした場合、(a)ロープの張力はどのようになりますか?, (b)何か力にな天井の供給を想定し、引き直下のロープ? 滑車システムの質量を無視してください。
図4. (a)滑車の組合せが力を増加するのに使用されています。 滑車が摩擦がない場合、力は張力の積分倍数である。 従ってこの滑車システムに負荷に付す二つのケーブルがありおよそ2Tの力を加える。 このマシンはMA≥2を持っています。 (b)三つのプーリーは、機械的な利点が約3であるような方法で負荷を持ち上げるために使用されます。, 効果的に、負荷に取り付けられた三つのケーブルがあります。 (c)この滑車システムはMA≥4があるように、4Tの力を加えます。 効果的に、ケーブルを引っ張り、システムです。
7. 演習6図4(c)に示すプーリーについて、ロープをまっすぐに引き上げると仮定して繰り返します。 滑車システムの固まりは7.00kgである。