Wenn Sie Probleme haben, das Konzept der Drehachse zu verstehen, finden Sie hier eine vereinfachte Erklärung. Dieses Konzept baut auf einem Verständnis der Bewegungsebenen und der verschiedenen Arten von Bewegungen an den Gelenken auf, also lernen Sie diese zuerst, bevor Sie die drei Drehachsen übernehmen.
Die Drehachse kann ein schwer zu greifendes Konzept sein, da es sich um eine imaginäre Entität handelt., In Bezug auf die menschliche Anatomie ist die Rotationsachse eine imaginäre Linie, die durch den Dreh – /Rotationspunkt in einem Gelenk projiziert wird (z. B. projiziert die Rotationsachse zum Biegen und Strecken des Arms durch das Ellenbogengelenk). Jede Bewegung in den drei Bewegungsebenen (dh sagittal, frontal und quer) tritt um eine Rotationsachse auf. Die Bewegung selbst—die natürlich nicht imaginär ist-tritt in einer imaginären Bewegungsebene auf, die senkrecht zur imaginären Rotationsachse steht., Dies bedeutet, dass sich beide imaginären Komponenten—die Ebene und die Achse-schneiden, um einen rechten (90°) Winkel zu erzeugen. Im Ellenbogenbeispiel bewegt sich der Unterarm in der Sagittalebene, wenn sich das Ellenbogengelenk (durch das die Rotationsachse auftritt) biegt und ausdehnt. Das heißt, der Arm bewegt sich in der Sagittalebene um eine Drehachse, die am Ellenbogen auftritt, was Flexion und Extension ermöglicht., Da Flexion und Extension in anteriorer bzw. posteriorer Richtung auftreten, ist die Rotationsachse senkrecht dazu und projiziert sich mediolateral oder von Seite zu Seite durch das Gelenk. Daher tritt für den Ellenbogen Bewegung in der Sagittalebene (als Flexion und Extension) um eine mediolaterale Rotationsachse auf.
So wie es drei Bewegungsebenen gibt, gibt es drei Drehachsen: die anterior-posteriore Achse, die mediolaterale Achse und die Längsachse. Gelenke drehen sich in diesen Achsen, so dass Bewegung in den Ebenen auftreten kann.,
Anterior-posteriore Achse
auch als Sagittalachse oder Anteroposteriorachse bekannt
Stellen Sie sich einen Stift vor, der von vorne nach hinten (anterior und posterior) durch ein Gelenk eingeführt wird und das Gelenk effektiv festhält, um seine potentielle Bewegungsfreiheit zu begrenzen. Zum Beispiel können Sie sich einen Stift vorstellen, der durch die Vorderseite des Hüftgelenks eindringt und aus dem Rücken austritt. Aufgrund der Position des Stiftes ist die einzige Bewegung, die um diese Achse erlaubt ist, die laterale Bewegung (Abduktion oder Adduktion) in der Frontalebene.,
Mediolaterale Achse
auch als Querachse bekannt
Mediolateral bedeutet, dass wir unseren imaginären Stift nehmen und ihn von einer lateralen oder seitlichen Annäherung einfügen. Wie im früheren Ellenbogenbeispiel ragt die Achse von der medialen Seite des Gelenks heraus und erstreckt sich über die laterale Seite. Die Position des Stiftes erlaubt nur Vorwärts – und Rückwärtsbewegung (Flexion und Extension) in der Sagittalebene um diese Achse.
Längsachse
Wenn wir unseren Stift von oben nach unten durch das Gelenk einführen, ermöglicht dies nur eine Bewegung in der Querebene (dh Rotation)., Stellen Sie sich einen langen Stift vor, der in die Oberseite der Halswirbelsäule eindringt und aus der Lendenwirbelsäule austritt. Der Stift würde effektiv verhindern, dass sich die Wirbelsäule nach vorne, hinten oder von Seite zu Seite beugt, aber es würde der Wirbelsäule ermöglichen, sich entlang einer Querebene zu drehen.
Gelenke drehen sich in diesen Achsen, so dass Bewegung in den Ebenen auftreten kann. Einige drehen sich nur um eine Achse, andere um mehrere Achsen.
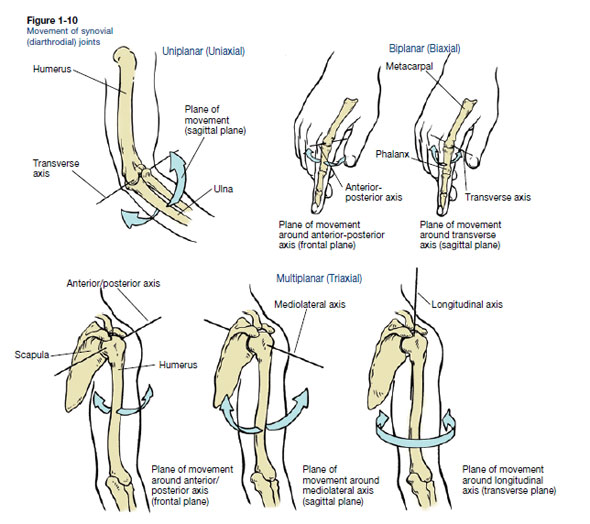
Einachsige oder uniplanare Gelenke (auch Scharniergelenke genannt) drehen sich um eine Achse und ermöglichen Bewegung in einer Ebene., Das Ellenbogengelenk ist ein Scharniergelenk, da es nur eine Bewegung vorwärts und rückwärts (Flexion und Extension) in der Sagittalebene ermöglicht.
Biaxiale oder biplanare Gelenke drehen sich um zwei Achsen und ermöglichen Bewegungen in zwei Ebenen. Fuß und Hand sind Beispiele für zweiachsige/biplanare Gelenke. Beide bewegen sich seitlich oder von Seite zu Seite in der Frontalebene und vorwärts und rückwärts (Flexion und Extension) in der Sagittalebene.
Multiplanare oder dreiachsige Gelenke drehen sich in allen drei Achsen und ermöglichen Bewegungen in allen drei Ebenen. Das Schultergelenk ist ein Beispiel für ein multiplanares / dreiachsiges Gelenk., Es ermöglicht Vorwärts – und Rückwärtsbewegung in der Sagittalebene, laterale oder Seite-zu-Seite-Bewegung in der Frontalebene und interne und externe Rotation in der Querebene.