Jednoduché stroje jsou zařízení, které mohou být použity pro násobení nebo rozšířit platnost, že aplikujeme – často na úkor vzdálenosti, přes který jsme použít sílu. Slovo pro “ stroj „pochází z řeckého slova, které znamená“ pomoci usnadnit věci.“Páky, ozubená kola, řemenice, klíny a šrouby jsou některé příklady strojů. Energie je pro tato zařízení stále zachována, protože stroj nemůže dělat více práce než energie, která je do něj vložena. Stroje však mohou snížit vstupní sílu potřebnou k provedení práce., Poměr výstupních a vstupních silových veličin pro jakýkoli jednoduchý stroj se nazývá jeho mechanická výhoda (MA).
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}\\
Jeden z nejjednodušších stroje je páka, která je tuhé bar je otočně uložen na pevné místo nazývá opěrný bod. Točivé momenty jsou zapojeny do pák, protože dochází k otáčení kolem otočného bodu. Vzdálenosti od fyzického otáčení páky jsou rozhodující a můžeme získat užitečný výraz pro MA, pokud jde o tyto vzdálenosti.,
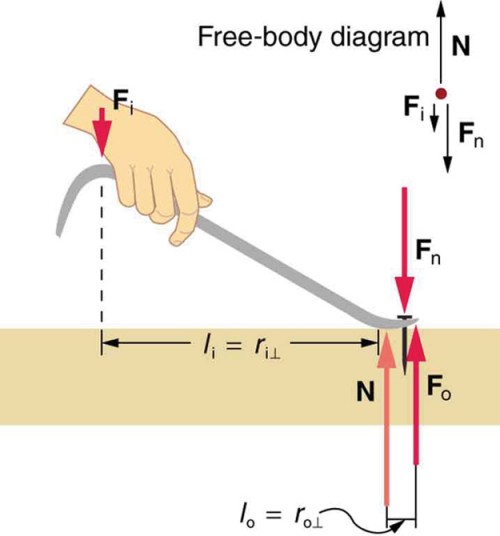
Obrázek 1. Stahovák na nehty je páka s velkou mechanickou výhodou. Vnější síly na stahováku nehtů jsou reprezentovány pevnými šipkami. Síla, kterou stahovák nehtů aplikuje na hřebík (Fo), není silou na stahovák nehtů. Reakční síla nehtu působí zpět na stahovák (Fn) je vnější síla a je rovná a naproti Fo. Kolmá Páková ramena vstupních a výstupních sil jsou li a lo.
Obrázek 1 ukazuje typ páky, který se používá jako stahovák nehtů., Páčidla,pily a další takové páky jsou podobné tomuto. Fi je vstupní síla a Fo je výstupní síla. Na stahováku nehtů působí tři svislé síly (systém zájmu) – Jedná se o Fi, Fo a N.Fn je reakční síla zpět na systém, stejná a opačná než Fo. (Všimněte si, že Fo není síla na systému.) N je normální síla na páce a její točivý moment je nulový, protože je vyvíjen na čepu. Momenty způsobené Fi a Fn musí být navzájem stejné, pokud se hřebík nepohybuje, aby splnila druhou podmínku rovnováhy (čistá τ = 0)., (Aby se hřebík skutečně pohyboval, musí být točivý moment způsobený Fi stále o něco větší než točivý moment v důsledku Fn.) Proto,
li Fi = lo Fo
kde li a lo jsou vzdálenosti od místa, kde vstupní a výstupní síly jsou aplikovány na čepu, jak je znázorněno na obrázku. Přeskupit poslední rovnice dává
\frac{{F}_{\text{o}}}{{F}_{\text{i}}}=\frac{{l}_{\text{i}}}{{l}_{\text{o}}}\\.,
to, Co nás zajímá nejvíce je, že velikost síly působící na hřebík stahovák, Fo, je mnohem větší než velikost vstupní síla působící na stahovák na druhém konci, Fi. Pro nail stahovák,
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}=\frac{{l}_{\text{i}}}{{l}_{\text{o}}}\\
Tato rovnice platí pro páky obecně. Pro stahovák nehtů je MA určitě větší než jeden. Čím delší je rukojeť na stahováku nehtů, tím větší je síla, kterou s ním můžete vyvíjet., Dva další typy pák, které se mírně liší od stahováku nehtů, jsou kolečko a lopata, znázorněné na obrázku 2. Všechny tyto páky typy jsou podobné v tom, že pouze tři síly jsou zapojeny – vstupní síly, výkon síly, a síla na čepu – a tedy jejich MAs je dána tím,
\text{MA}=\frac{{F}_{\text{o}}}{{F}_{\text{i}}}\\
a
\text{MA}=\frac{{d}_{1}}{{d}_{2}}\\,
s vzdálenosti se měří vzhledem k fyzické pivot., Kolečko a lopata se liší od stahováku nehtů, protože vstupní i výstupní síly jsou na stejné straně čepu. V případě kolečka je výstupní síla nebo zatížení mezi čepem (nápravou kola) a vstupní nebo aplikovanou silou. V případě lopaty je vstupní síla mezi čepem (na konci rukojeti) a zatížením, ale rameno vstupní páky je kratší než rameno výstupní páky. V tomto případě je MA menší než jeden.
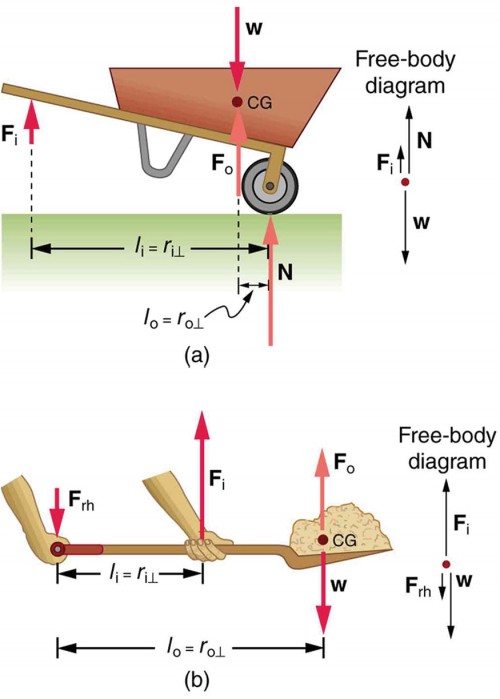
Obrázek 2., (a) v případě kolečka je výstupní síla nebo zatížení mezi otočným čepem a vstupní silou. Čep je náprava kola. Zde je výstupní síla větší než vstupní síla. Trakař vám tak umožňuje zvedat mnohem těžší zatížení, než byste mohli s tělem samotným. b) v případě lopaty je vstupní síla mezi čepem a zatížením, ale rameno vstupní páky je kratší než rameno výstupní páky. Otočný čep je na rukojeti držené pravou rukou., Zde je výstupní síla (podporující zatížení lopaty) menší než vstupní síla (z ruky nejblíže zatížení), protože vstup je vyvíjen blíže k čepu než je výstup.
dalším velmi jednoduchým strojem je nakloněná rovina. Posunutí vozíku do letadla je jednodušší než zvedání stejného vozíku přímo nahoru pomocí žebříku, protože použitá síla je menší. Práce provedená v obou případech (za předpokladu, že práce prováděná třením je zanedbatelná) je však stejná., Při stavbě egyptských pyramid byly pravděpodobně použity šikmé pruhy nebo rampy k přesunu velkých kamenných bloků na vrchol. Klika je páka, kterou lze otáčet o 360 ° kolem jejího čepu, jak je znázorněno na obrázku 3. Takový stroj nemusí vypadat jako páka, ale fyzika jeho činností zůstává stejná. MA pro kliku je jednoduše poměr poloměrů ri / r0. Kola a ozubená kola mají tento jednoduchý výraz i pro své MAs. MA může být větší než 1, protože je to pro kliku, nebo méně než 1, protože je to pro zjednodušenou nápravu automobilu pohánějící kola, jak je znázorněno. Pokud je poloměr nápravy 2.,0 cm a kolo má poloměr je 24.0 cm, pak MA = 2.0/24.0 = 0.083 a nápravu by musel vyvinout sílu 12 000 N na volantu, aby mohl vyvinout sílu 1000 N na zemi.
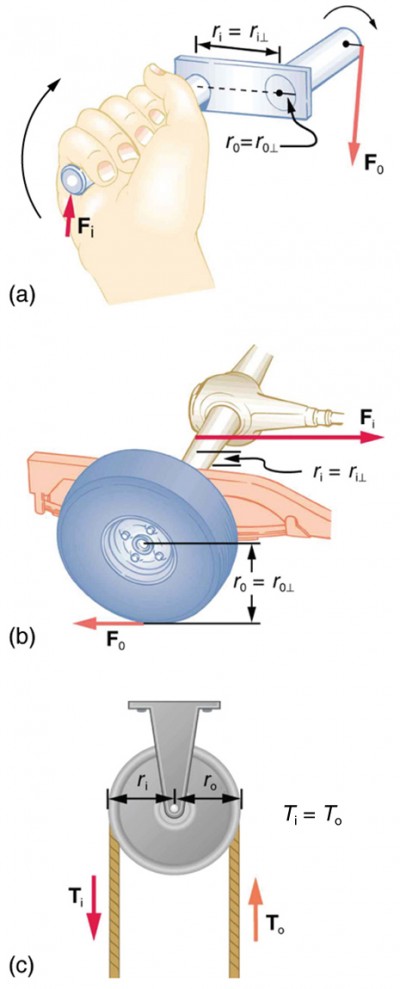
Obrázek 3. (a) klika je typ páky, kterou lze otáčet o 360 ° kolem jejího čepu. Kliky jsou obvykle navrženy tak, aby měly velký MA. b) Zjednodušená automobilová náprava pohání kolo, které má mnohem větší průměr než náprava. MA je méně než 1. c) pro zvedání těžkých břemen se používá běžná kladka., Řemenice mění směr síly T vyvíjené kabelem bez změny jeho velikosti. Proto má tento stroj MA 1.
běžná kladka má MA 1; mění pouze směr síly a nikoli její velikost. Kombinace řemenic, jako jsou ty, které jsou znázorněny na obrázku 4, se používají k násobení síly. Pokud jsou řemenice bez tření, výkon síly je přibližně integrální násobek napětí v kabelu., Počet kabelů tahem přímo vzhůru na systém zájmu, jak je znázorněno v níže uvedené údaje, je přibližně MA z řemenice systému. Vzhledem k tomu, že každá příloha aplikuje vnější sílu přibližně ve stejném směru jako ostatní, přidávají a vytvářejí celkovou sílu, která je téměř integrálním násobkem vstupní síly T.
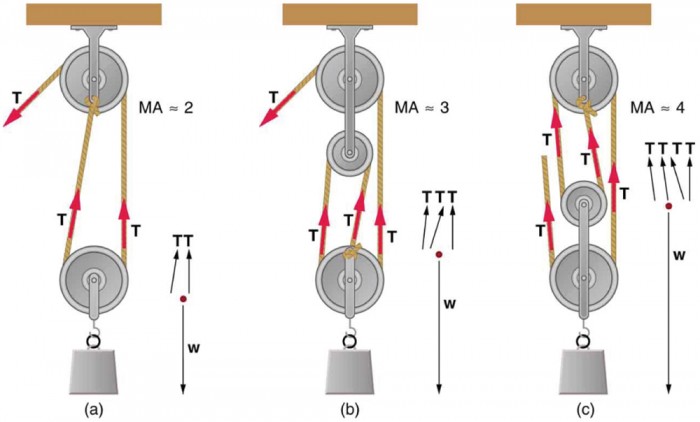
Obrázek 4. a) kombinace řemenic se používá k násobení síly. Síla je integrální násobek napětí, pokud jsou řemenice bez tření., Tento řemenicový systém má dva kabely připojené k jeho zatížení, čímž se aplikuje síla přibližně 2t . Tento stroj má ma ≈ 2. b) tři kladky se používají ke zvedání nákladu tak, aby mechanická výhoda byla asi 3. Efektivně jsou k zatížení připojeny tři kabely. c) tento řemenicový systém používá sílu 4T, takže má ma ≈ 4. Čtyři kabely účinně táhnou systém zájmu.,
Oddíl Shrnutí
- Jednoduché stroje jsou zařízení, které mohou být použity pro násobení nebo rozšířit platnost, že aplikujeme – často na úkor vzdálenosti, přes který budeme muset použít síly.
- poměr výstupu ke vstupu síly pro jakýkoliv jednoduchý stroj, se nazývá mechanická výhoda
- několik jednoduché stroje jsou páka, hřebík stahovák, kolečko, kliky, atd.
koncepční otázky
1. Nůžky jsou jako systém s dvojitou pákou., Který z jednoduchých strojů na obrázku 1 a obrázku 2 je nejvíce podobný nůžkám?
2. Předpokládejme, že taháte hřebík konstantní rychlostí pomocí stahováku nehtů, jak je znázorněno na obrázku 1. Je stahovák nehtů v rovnováze? Co když zatáhnete hřebík s určitým zrychlením-je tedy stahovač nehtů v rovnováze? V takovém případě je síla působící na stahovák nehtů větší a proč?
3. Proč jsou síly vyvíjené na vnější svět končetinami našich těl obvykle mnohem menší než síly vyvíjené svaly uvnitř těla?,
4. Vysvětlete, proč jsou síly v našich kloubech několikrát větší než síly, které vyvíjíme na vnějším světě s našimi končetinami. Mohou být tyto síly ještě větší než svalové síly (viz předchozí otázka)?
Problémy & Cvičení
1. Co je mechanické výhodu, že hřebík stahovák—podobné je znázorněno na Obrázku 1—, kde si vyvinout sílu 45 cm od otočné a hřebík je 1,8 cm na druhé straně? Jakou minimální sílu musíte vyvinout, abyste na hřebík aplikovali sílu 1250 N?,
Obrázek 1. Stahovák na nehty je páka s velkou mechanickou výhodou. Vnější síly na stahováku nehtů jsou reprezentovány pevnými šipkami. Síla, kterou stahovák nehtů aplikuje na hřebík (Fo), není silou na stahovák nehtů. Reakční síla nehtu působí zpět na stahovák (Fn) je vnější síla a je rovná a naproti Fo. Kolmá Páková ramena vstupních a výstupních sil jsou li a lo.
2. Předpokládejme, že jste potřebovali zvednout sekačku o hmotnosti 250 kg ve vzdálenosti 6.,0 cm nad zemí pro výměnu pneumatiky. Pokud byste měli páku o délce 2,0 m, kam byste umístili opěrku, pokud by byla vaše síla omezena na 300 N?
3. a) Jaká je mechanická výhoda trakař, jako je ten na Obrázku 2, je-li těžiště kolečko a jeho zatížení je kolmé rameno páky 5.50 cm, zatímco ruce mají kolmé rameno páky 1,02 m? b) jakou vzestupnou sílu byste měli vyvinout na podporu trakaře a jeho zatížení, pokud je jejich kombinovaná hmotnost 55,0 kg? c) jakou silou působí kolo na zem?,
4. Typické auto má nápravu s poloměrem 1,10 cm pohánějící pneumatiku s poloměrem 27,5 cm. Jaká je jeho mechanická výhoda za předpokladu velmi zjednodušeného modelu na obrázku 3 (b)?
5. Jakou sílu má stahovák nehtů ve cvičení 1 na nosné ploše? Stahovák na nehty má hmotnost 2,10 kg.
6. Pokud jste použili ideální řemenici typu znázorněného na obrázku 4(a) k podpoře automobilového motoru o hmotnosti 115 kg, (a) jaké by bylo napětí v laně?, (b) jakou silou musí být přívod stropu za předpokladu, že zatáhnete přímo na lano? Zanedbávat hmotnost kladky systému.
obrázek 4. a) kombinace řemenic se používá k násobení síly. Síla je integrální násobek napětí, pokud jsou řemenice bez tření. Tento řemenicový systém má dva kabely připojené k jeho zatížení, čímž se aplikuje síla přibližně 2t . Tento stroj má ma ≈ 2. b) tři kladky se používají ke zvedání nákladu tak, aby mechanická výhoda byla asi 3., Efektivně jsou k zatížení připojeny tři kabely. c) tento řemenicový systém používá sílu 4T, takže má ma ≈ 4. Čtyři kabely účinně táhnou systém zájmu.
7. Opakujte cvičení 6 pro řemenici znázorněnou na obrázku 4 (c), za předpokladu, že zatáhnete přímo na lano. Hmotnost kladky je 7,00 kg.